第38节 内存管理(节选)
❤️💕💕Go语言高级篇章,在此之前建议您先了解基础和进阶篇。Myblog:http://nsddd.top
Go语言基础篇
Go语言100篇进阶
[TOC]
前言
- [x] 原文链接
本章节已收录《Golang修养之路》www.yuque.com/aceld/golang/ithv8f 第一篇第2章节。 该文章主要详细具体的介绍Goroutine调度器过程及原理,可以对Go调度器的详细调度过程有一个清晰的理解,花 费4天时间作了30+...
本章节已收录《Golang 修养之路》www.yuque.com/aceld/golang/ithv8f 第一篇第 2 章节。
该文章主要详细具体的介绍 Goroutine 调度器过程及原理,可以对 Go 调度器的详细调度过程有一个清晰的理解,花 费 4 天时间作了 30 + 张图 (推荐收藏),包括如下几个章节。

第一章 Golang 调度器的由来
第二章 Goroutine 调度器的 GMP 模型及设计思想
第三章 Goroutine 调度场景过程全图文解析
一、Golang “调度器” 的由来?#
(1) 单进程时代不需要调度器#
我们知道,一切的软件都是跑在操作系统上,真正用来干活 (计算) 的是 CPU。早期的操作系统每个程序就是一个进程,直到一个程序运行完,才能进行下一个进程,就是 “单进程时代”
一切的程序只能串行发生。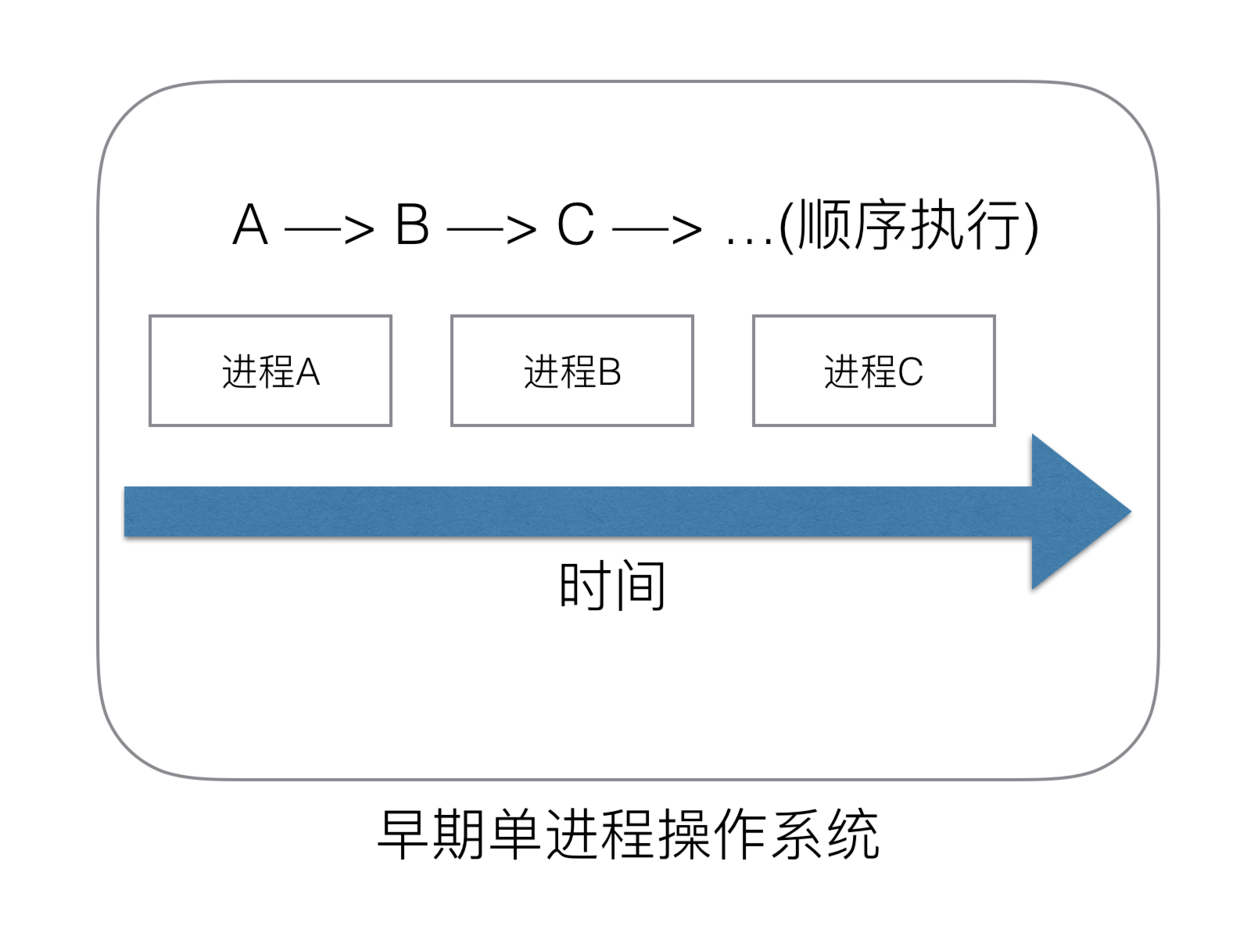
早期的单进程操作系统,面临 2 个问题:
单一的执行流程,计算机只能一个任务一个任务处理。
进程阻塞所带来的 CPU 时间浪费。
那么能不能有多个进程来宏观一起来执行多个任务呢?
后来操作系统就具有了最早的并发能力:多进程并发,当一个进程阻塞的时候,切换到另外等待执行的进程,这样就能尽量把 CPU 利用起来,CPU 就不浪费了。
(2) 多进程 / 线程时代有了调度器需求#
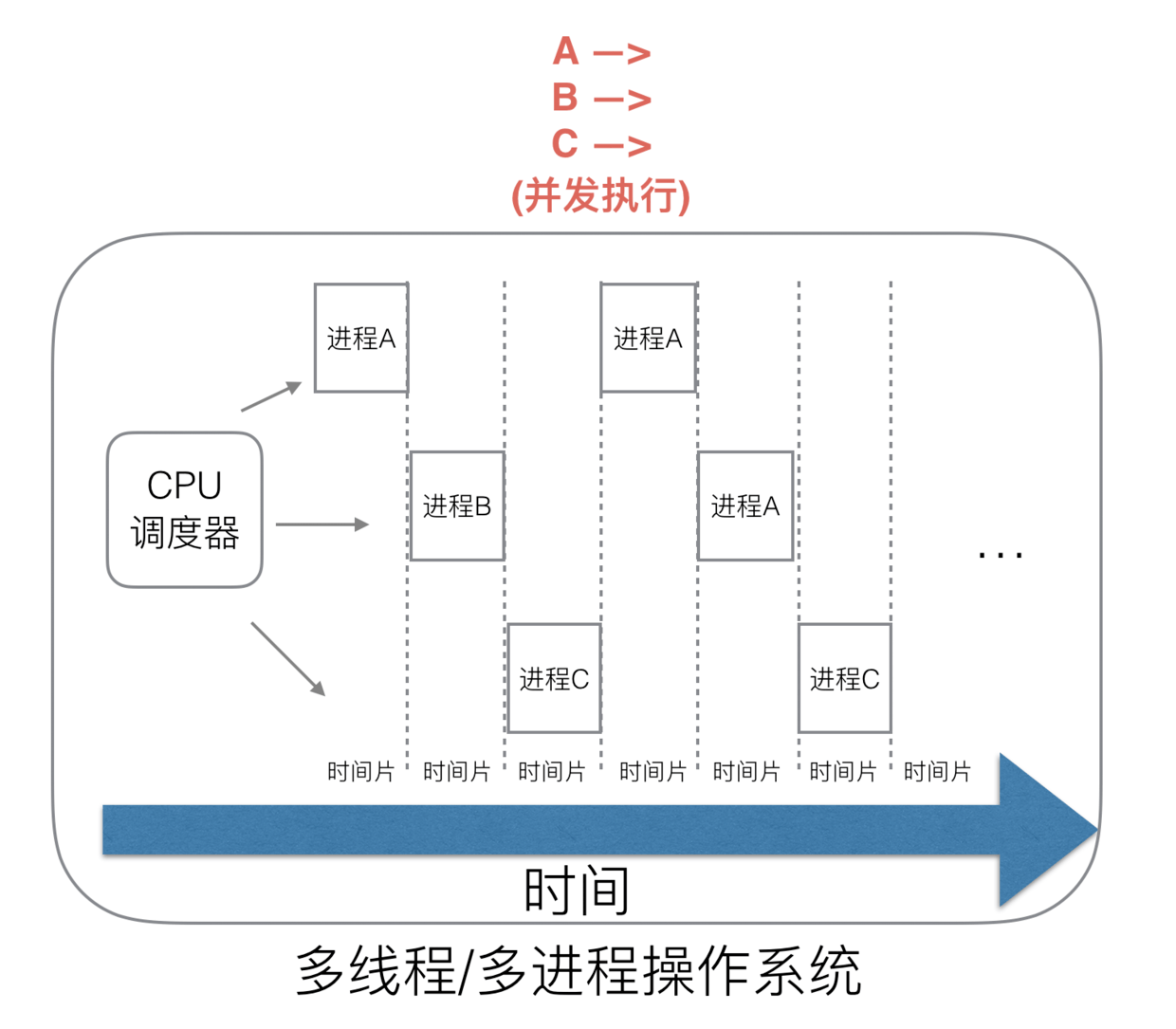
在多进程 / 多线程的操作系统中,就解决了阻塞的问题,因为一个进程阻塞 cpu 可以立刻切换到其他进程中去执行,而且调度 cpu 的算法可以保证在运行的进程都可以被分配到 cpu 的运行时间片。这样从宏观来看,似乎多个进程是在同时被运行。
但新的问题就又出现了,进程拥有太多的资源,进程的创建、切换、销毁,都会占用很长的时间,CPU 虽然利用起来了,但如果进程过多,CPU 有很大的一部分都被用来进行进程调度了。
怎么才能提高 CPU 的利用率呢?
但是对于 Linux 操作系统来讲,cpu 对进程的态度和线程的态度是一样的。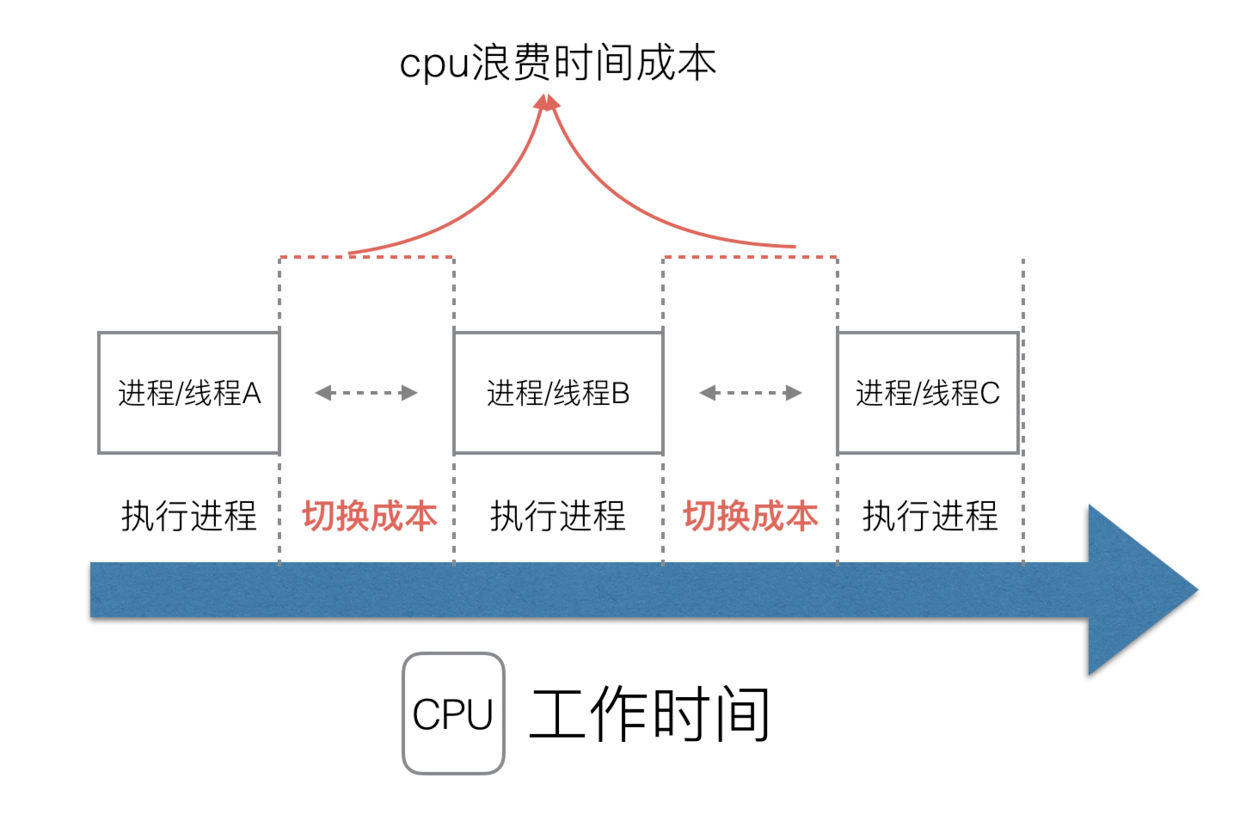
很明显,CPU 调度切换的是进程和线程。尽管线程看起来很美好,但实际上多线程开发设计会变得更加复杂,要考虑很多同步竞争等问题,如锁、竞争冲突等。
(3) 协程来提高 CPU 利用率#
多进程、多线程已经提高了系统的并发能力,但是在当今互联网高并发场景下,为每个任务都创建一个线程是不现实的,因为会消耗大量的内存 (进程虚拟内存会占用 4GB [32 位操作系统], 而线程也要大约 4MB)。
大量的进程 / 线程出现了新的问题
- 高内存占用
- 调度的高消耗 CPU
好了,然后工程师们就发现,其实一个线程分为 “内核态 “线程和” 用户态 “线程。
一个 “用户态线程” 必须要绑定一个 “内核态线程”,但是 CPU 并不知道有 “用户态线程” 的存在,它只知道它运行的是一个 “内核态线程”(Linux 的 PCB 进程控制块)。
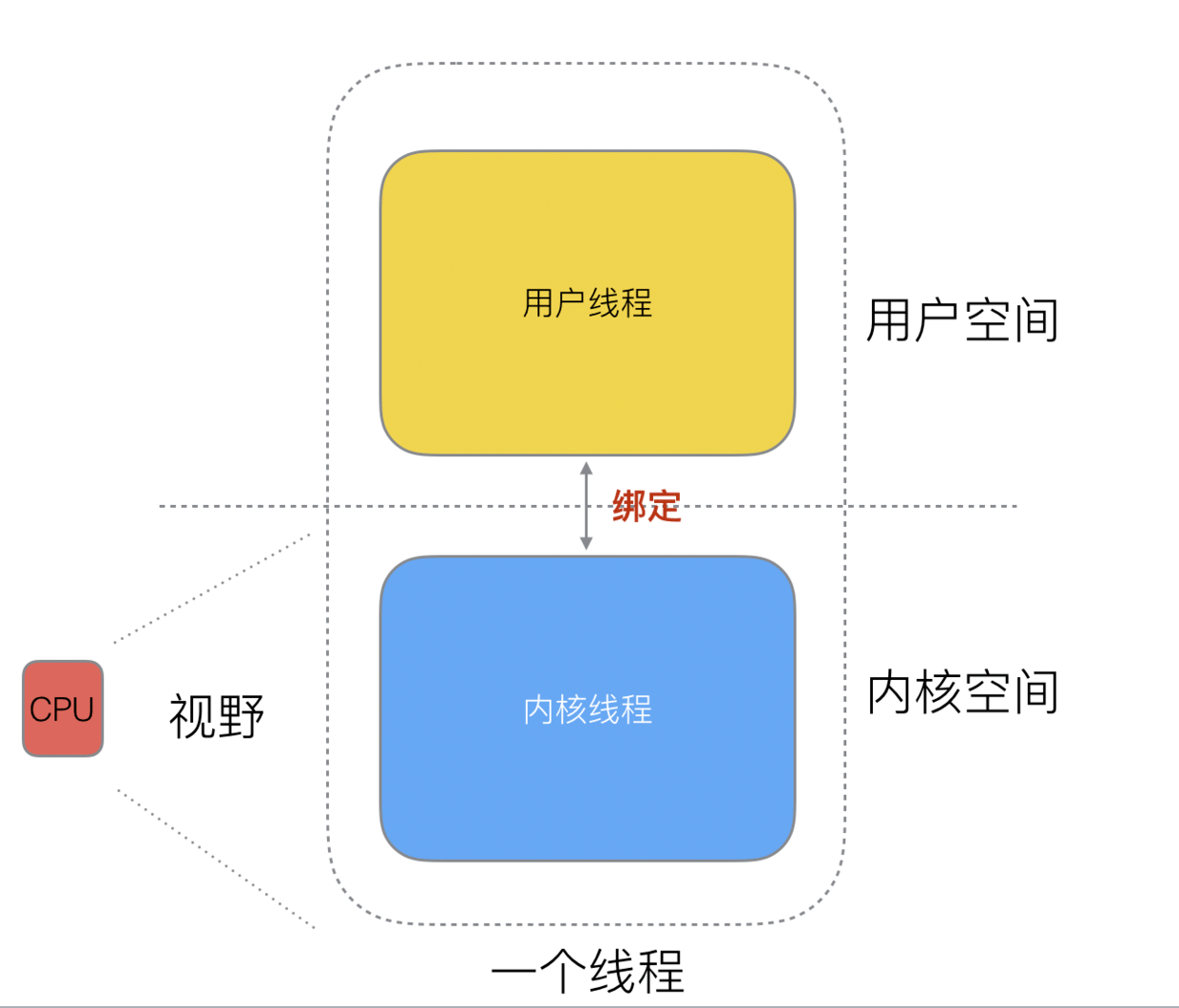
这样,我们再去细化去分类一下,内核线程依然叫 “线程 (thread)”,用户线程叫 “协程 (co-routine)”.

看到这里,我们就要开脑洞了,既然一个协程 (co-routine) 可以绑定一个线程 (thread),那么能不能多个协程 (co-routine) 绑定一个或者多个线程 (thread) 上呢。
之后,我们就看到了有 3 种协程和线程的映射关系:
N:1 关系#
N 个协程绑定 1 个线程,优点就是协程在用户态线程即完成切换,不会陷入到内核态,这种切换非常的轻量快速。但也有很大的缺点,1 个进程的所有协程都绑定在 1 个线程上
缺点:
- 某个程序用不了硬件的多核加速能力
- 一旦某协程阻塞,造成线程阻塞,本进程的其他协程都无法执行了,根本就没有并发的能力了。

1:1 关系#
1 个协程绑定 1 个线程,这种最容易实现。协程的调度都由 CPU 完成了,不存在 N:1 缺点,
缺点:
- 协程的创建、删除和切换的代价都由 CPU 完成,有点略显昂贵了。

M:N 关系#
M 个协程绑定 1 个线程,是 N:1 和 1:1 类型的结合,克服了以上 2 种模型的缺点,但实现起来最为复杂。
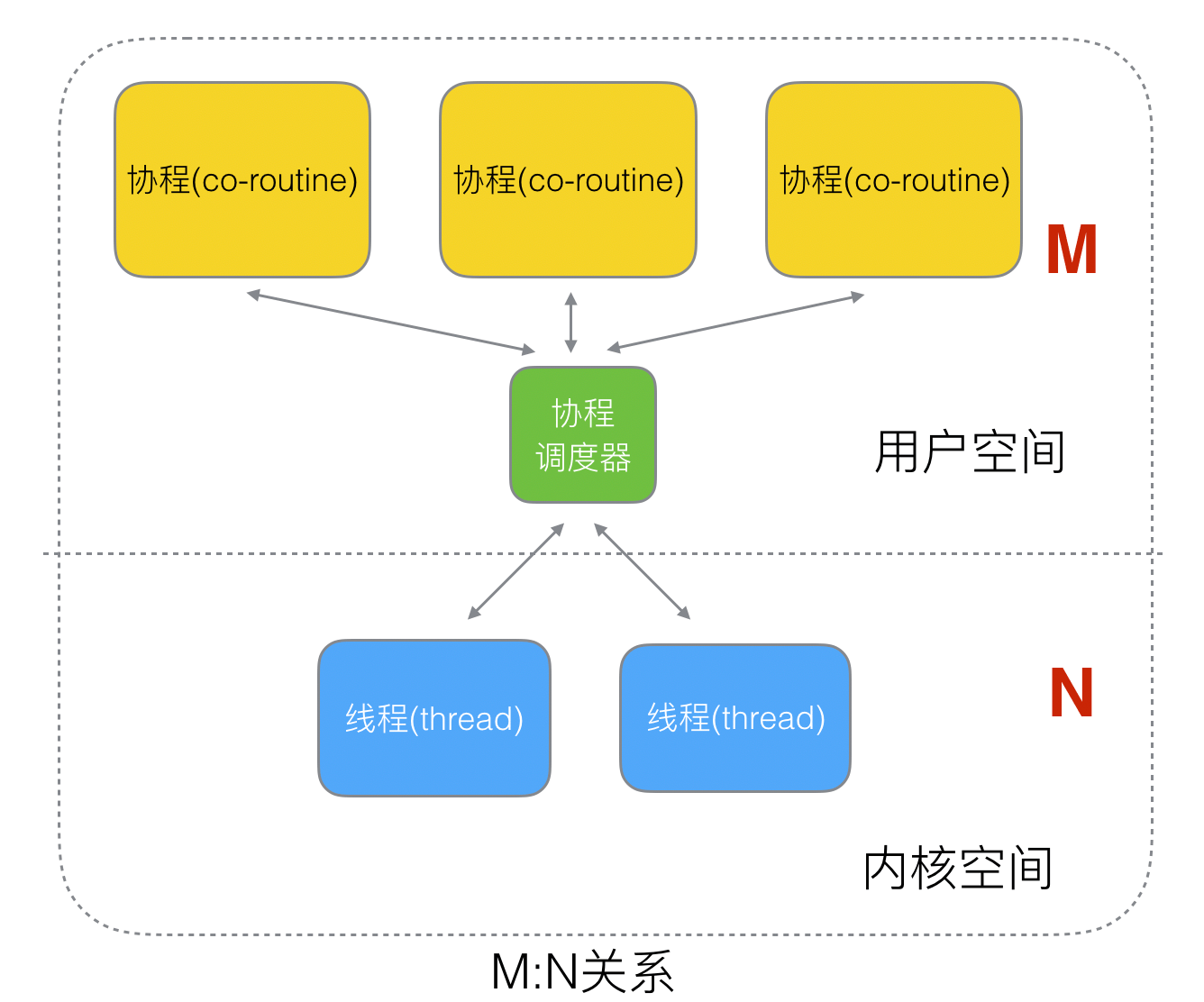
协程跟线程是有区别的,线程由 CPU 调度是抢占式的,协程由用户态调度是协作式的,一个协程让出 CPU 后,才执行下一个协程。
(4) Go 语言的协程 goroutine#
Go 为了提供更容易使用的并发方法,使用了 goroutine 和 channel。goroutine 来自协程的概念,让一组可复用的函数运行在一组线程之上,即使有协程阻塞,该线程的其他协程也可以被 runtime 调度,转移到其他可运行的线程上。最关键的是,程序员看不到这些底层的细节,这就降低了编程的难度,提供了更容易的并发。
Go 中,协程被称为 goroutine,它非常轻量,一个 goroutine 只占几 KB,并且这几 KB 就足够 goroutine 运行完,这就能在有限的内存空间内支持大量 goroutine,支持了更多的并发。虽然一个 goroutine 的栈只占几 KB,但实际是可伸缩的,如果需要更多内容,runtime 会自动为 goroutine 分配。
Goroutine 特点:
- 占用内存更小(几 kb)
- 调度更灵活 (runtime 调度)
(5) 被废弃的 goroutine 调度器#
好了,既然我们知道了协程和线程的关系,那么最关键的一点就是调度协程的调度器的实现了。
Go 目前使用的调度器是 2012 年重新设计的,因为之前的调度器性能存在问题,所以使用 4 年就被废弃了,那么我们先来分析一下被废弃的调度器是如何运作的?
大部分文章都是会用 G 来表示 Goroutine,用 M 来表示线程,那么我们也会用这种表达的对应关系。
下面我们来看看被废弃的 golang 调度器是如何实现的?
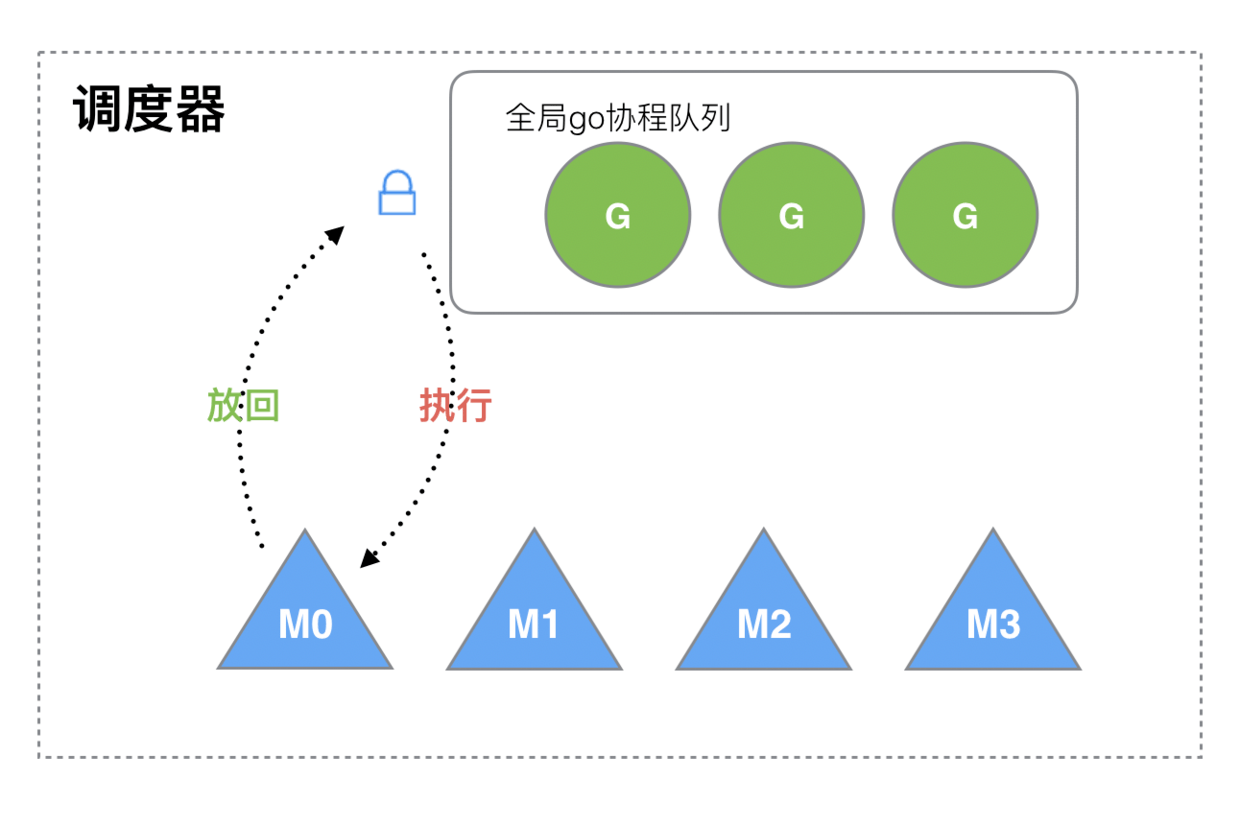
M 想要执行、放回 G 都必须访问全局 G 队列,并且 M 有多个,即多线程访问同一资源需要加锁进行保证互斥 / 同步,所以全局 G 队列是有互斥锁进行保护的。
老调度器有几个缺点:
- 创建、销毁、调度 G 都需要每个 M 获取锁,这就形成了激烈的锁竞争。
- M 转移 G 会造成延迟和额外的系统负载。比如当 G 中包含创建新协程的时候,M 创建了 G’,为了继续执行 G,需要把 G’交给 M’执行,也造成了很差的局部性,因为 G’和 G 是相关的,最好放在 M 上执行,而不是其他 M’。
- 系统调用 (CPU 在 M 之间的切换) 导致频繁的线程阻塞和取消阻塞操作增加了系统开销。
二、Goroutine 调度器的 GMP 模型的设计思想#
面对之前调度器的问题,Go 设计了新的调度器。
在新调度器中,除了 M (thread) 和 G (goroutine),又引进了 P (Processor)。
Processor,它包含了运行 goroutine 的资源,如果线程想运行 goroutine,必须先获取 P,P 中还包含了可运行的 G 队列。
(1) GMP 模型#
在 Go 中,线程是运行 goroutine 的实体,调度器的功能是把可运行的 goroutine 分配到工作线程上。
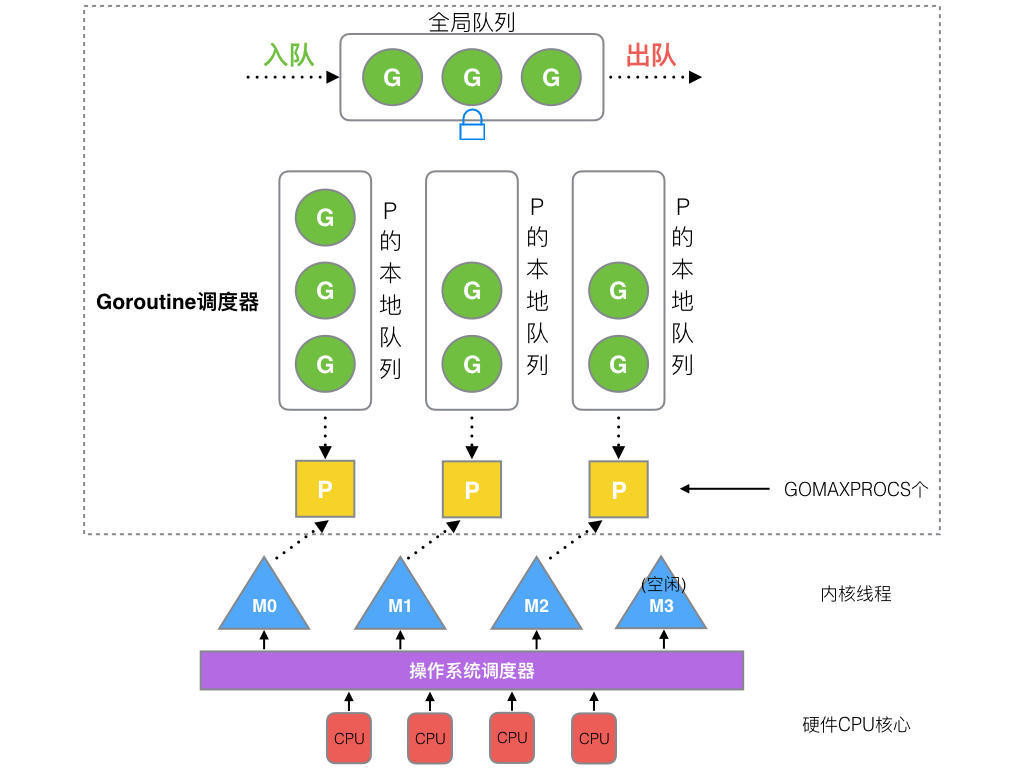
- 全局队列(Global Queue):存放等待运行的 G。
- P 的本地队列:同全局队列类似,存放的也是等待运行的 G,存的数量有限,不超过 256 个。新建 G’时,G’优先加入到 P 的本地队列,如果队列满了,则会把本地队列中一半的 G 移动到全局队列。
- P 列表:所有的 P 都在程序启动时创建,并保存在数组中,最多有
GOMAXPROCS(可配置) 个。 - M:线程想运行任务就得获取 P,从 P 的本地队列获取 G,P 队列为空时,M 也会尝试从全局队列拿一批 G 放到 P 的本地队列,或从其他 P 的本地队列偷一半放到自己 P 的本地队列。M 运行 G,G 执行之后,M 会从 P 获取下一个 G,不断重复下去。
Goroutine 调度器和 OS 调度器是通过 M 结合起来的,每个 M 都代表了 1 个内核线程,OS 调度器负责把内核线程分配到 CPU 的核上执行。
有关 P 和 M 的个数问题#
1、P 的数量:
- 由启动时环境变量
$GOMAXPROCS或者是由runtime的方法GOMAXPROCS()决定。这意味着在程序执行的任意时刻都只有$GOMAXPROCS个 goroutine 在同时运行。
2、M 的数量:
- go 语言本身的限制:go 程序启动时,会设置 M 的最大数量,默认 10000. 但是内核很难支持这么多的线程数,所以这个限制可以忽略。
- runtime/debug 中的 SetMaxThreads 函数,设置 M 的最大数量
- 一个 M 阻塞了,会创建新的 M。
M 与 P 的数量没有绝对关系,一个 M 阻塞,P 就会去创建或者切换另一个 M,所以,即使 P 的默认数量是 1,也有可能会创建很多个 M 出来。
P 和 M 何时会被创建#
1、P 何时创建:在确定了 P 的最大数量 n 后,运行时系统会根据这个数量创建 n 个 P。
2、M 何时创建:没有足够的 M 来关联 P 并运行其中的可运行的 G。比如所有的 M 此时都阻塞住了,而 P 中还有很多就绪任务,就会去寻找空闲的 M,而没有空闲的,就会去创建新的 M。
(2) 调度器的设计策略#
复用线程:避免频繁的创建、销毁线程,而是对线程的复用。
1)work stealing 机制
当本线程无可运行的 G 时,尝试从其他线程绑定的 P 偷取 G,而不是销毁线程。
2)hand off 机制
当本线程因为 G 进行系统调用阻塞时,线程释放绑定的 P,把 P 转移给其他空闲的线程执行。
利用并行:GOMAXPROCS 设置 P 的数量,最多有 GOMAXPROCS 个线程分布在多个 CPU 上同时运行。GOMAXPROCS 也限制了并发的程度,比如 GOMAXPROCS = 核数/2,则最多利用了一半的 CPU 核进行并行。
抢占:在 coroutine 中要等待一个协程主动让出 CPU 才执行下一个协程,在 Go 中,一个 goroutine 最多占用 CPU 10ms,防止其他 goroutine 被饿死,这就是 goroutine 不同于 coroutine 的一个地方。
全局 G 队列:在新的调度器中依然有全局 G 队列,但功能已经被弱化了,当 M 执行 work stealing 从其他 P 偷不到 G 时,它可以从全局 G 队列获取 G。
(3) go func () 调度流程#
从上图我们可以分析出几个结论:
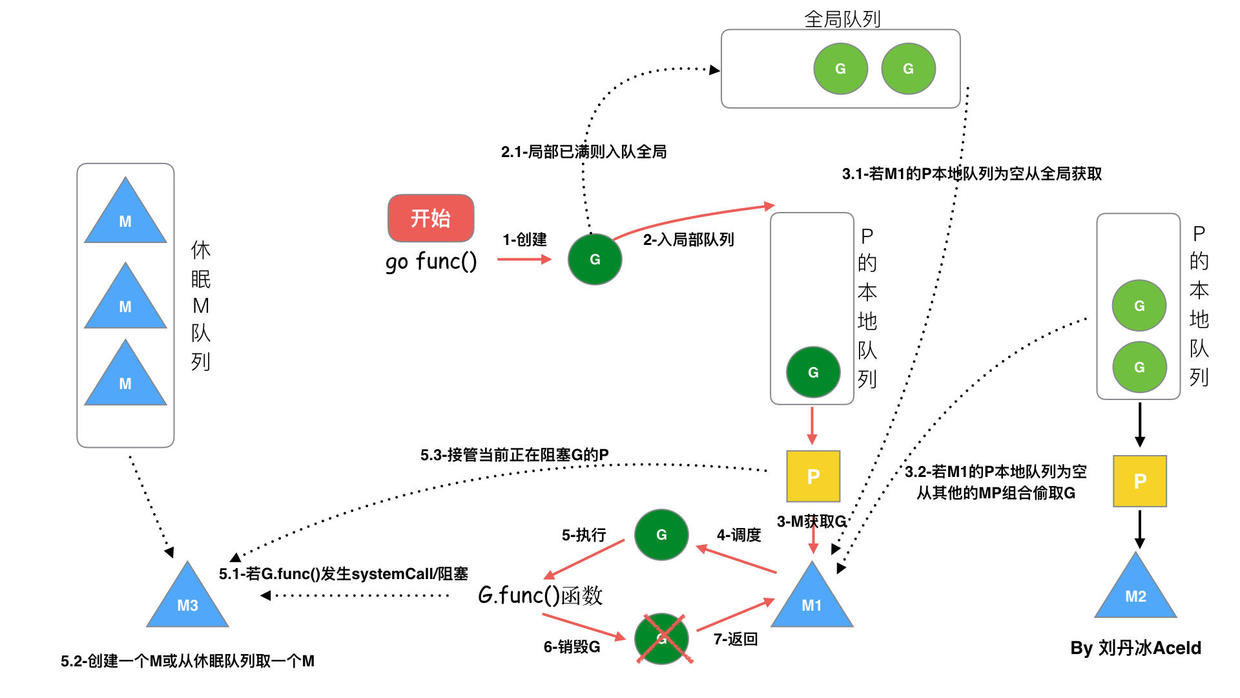
1、我们通过 go func () 来创建一个 goroutine;
2、有两个存储 G 的队列,一个是局部调度器 P 的本地队列、一个是全局 G 队列。新创建的 G 会先保存在 P 的本地队列中,如果 P 的本地队列已经满了就会保存在全局的队列中;
3、G 只能运行在 M 中,一个 M 必须持有一个 P,M 与 P 是 1:1 的关系。M 会从 P 的本地队列弹出一个可执行状态的 G 来执行,如果 P 的本地队列为空,就会向其他的 MP 组合偷取一个可执行的 G 来执行;
4、一个 M 调度 G 执行的过程是一个循环机制;
5、当 M 执行某一个 G 时候如果发生了 syscall 或则其余阻塞操作,M 会阻塞,如果当前有一些 G 在执行,runtime 会把这个线程 M 从 P 中摘除 (detach),然后再创建一个新的操作系统的线程 (如果有空闲的线程可用就复用空闲线程) 来服务于这个 P;
6、当 M 系统调用结束时候,这个 G 会尝试获取一个空闲的 P 执行,并放入到这个 P 的本地队列。如果获取不到 P,那么这个线程 M 变成休眠状态, 加入到空闲线程中,然后这个 G 会被放入全局队列中。
(4) 调度器的生命周期#
特殊的 M0 和 G0
M0
M0 是启动程序后的编号为 0 的主线程,这个 M 对应的实例会在全局变量 runtime.m0 中,不需要在 heap 上分配,M0 负责执行初始化操作和启动第一个 G, 在之后 M0 就和其他的 M 一样了。
G0
G0 是每次启动一个 M 都会第一个创建的 goroutine,G0 仅用于负责调度的 G,G0 不指向任何可执行的函数,每个 M 都会有一个自己的 G0。在调度或系统调用时会使用 G0 的栈空间,全局变量的 G0 是 M0 的 G0。
我们来跟踪一段代码
package main
import "fmt"
func main() {
fmt.Println("Hello world")
}
接下来我们来针对上面的代码对调度器里面的结构做一个分析。
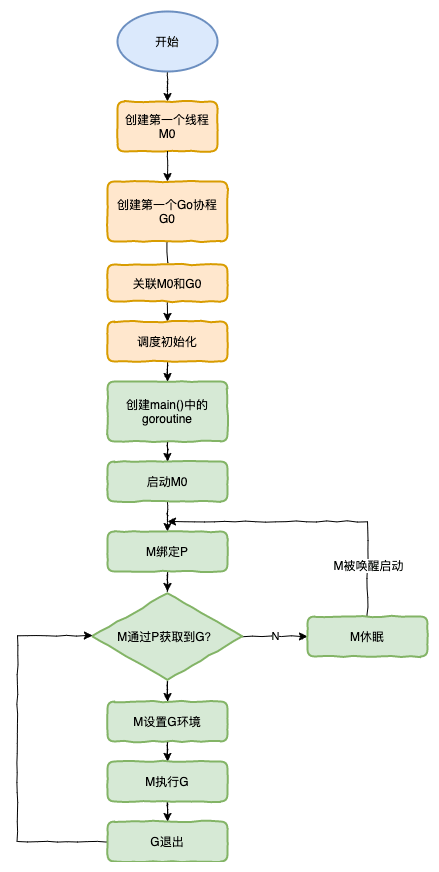
也会经历如上图所示的过程:
- runtime 创建最初的线程 m0 和 goroutine g0,并把 2 者关联。
- 调度器初始化:初始化 m0、栈、垃圾回收,以及创建和初始化由 GOMAXPROCS 个 P 构成的 P 列表。
- 示例代码中的 main 函数是
main.main,runtime中也有 1 个 main 函数 ——runtime.main,代码经过编译后,runtime.main会调用main.main,程序启动时会为runtime.main创建 goroutine,称它为 main goroutine 吧,然后把 main goroutine 加入到 P 的本地队列。 - 启动 m0,m0 已经绑定了 P,会从 P 的本地队列获取 G,获取到 main goroutine。
- G 拥有栈,M 根据 G 中的栈信息和调度信息设置运行环境
- M 运行 G
- G 退出,再次回到 M 获取可运行的 G,这样重复下去,直到
main.main退出,runtime.main执行 Defer 和 Panic 处理,或调用runtime.exit退出程序。
调度器的生命周期几乎占满了一个 Go 程序的一生,runtime.main 的 goroutine 执行之前都是为调度器做准备工作,runtime.main 的 goroutine 运行,才是调度器的真正开始,直到 runtime.main 结束而结束。
(5) 可视化 GMP 编程#
有 2 种方式可以查看一个程序的 GMP 的数据。
方式 1:go tool trace
trace 记录了运行时的信息,能提供可视化的 Web 页面。
简单测试代码:main 函数创建 trace,trace 会运行在单独的 goroutine 中,然后 main 打印”Hello World” 退出。
trace.go
package main
import (
"os"
"fmt"
"runtime/trace"
)
func main() {
//创建trace文件
f, err := os.Create("trace.out")
if err != nil {
panic(err)
}
defer f.Close()
//启动trace goroutine
err = trace.Start(f)
if err != nil {
panic(err)
}
defer trace.Stop()
//main
fmt.Println("Hello World")
}
运行程序
$ go run trace.go
Hello World
会得到一个 trace.out 文件,然后我们可以用一个工具打开,来分析这个文件。
$ go tool trace trace.out
2020/02/23 10:44:11 Parsing trace...
2020/02/23 10:44:11 Splitting trace...
2020/02/23 10:44:11 Opening browser. Trace viewer is listening on http://127.0.0.1:33479
我们可以通过浏览器打开 http://127.0.0.1:33479 网址,点击 view trace 能够看见可视化的调度流程。
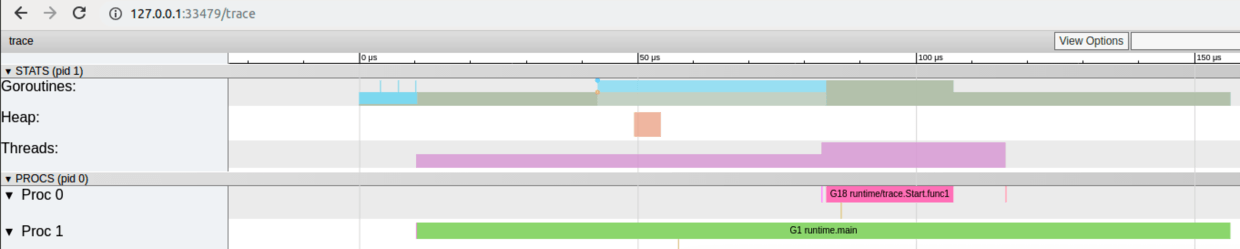

G 信息
点击 Goroutines 那一行可视化的数据条,我们会看到一些详细的信息。
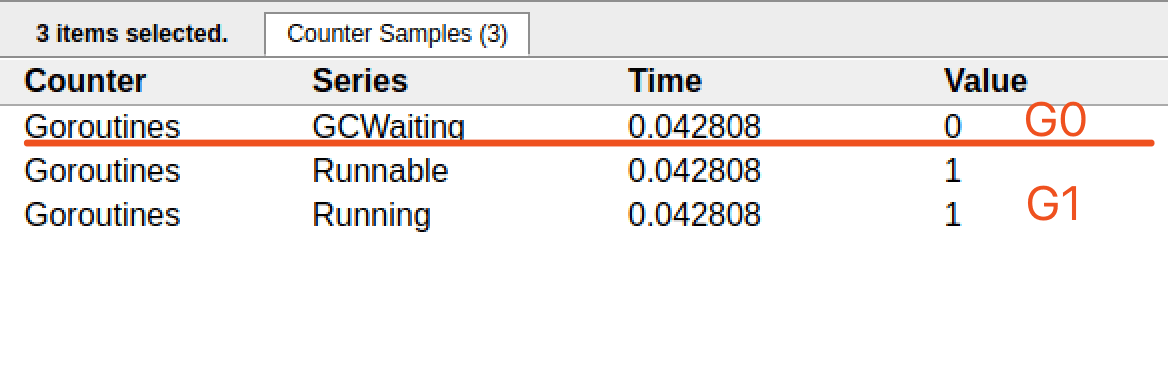
一共有两个G在程序中,一个是特殊的G0,是每个M必须有的一个初始化的G,这个我们不必讨论。
其中 G1 应该就是 main goroutine (执行 main 函数的协程),在一段时间内处于可运行和运行的状态。
M 信息
点击 Threads 那一行可视化的数据条,我们会看到一些详细的信息。
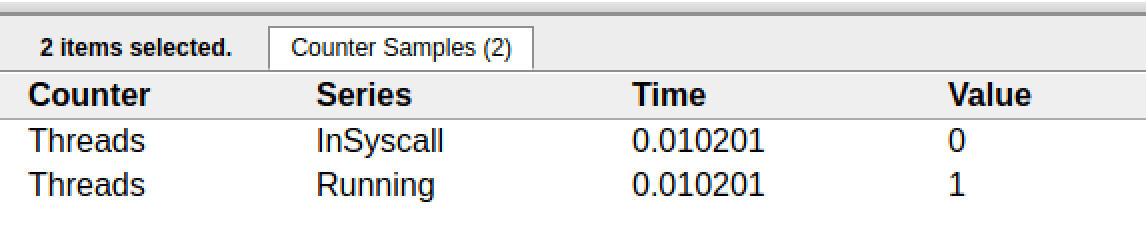
一共有两个 M 在程序中,一个是特殊的 M0,用于初始化使用,这个我们不必讨论。
P 信息
G1 中调用了 main.main,创建了 trace goroutine g18。G1 运行在 P1 上,G18 运行在 P0 上。
这里有两个 P,我们知道,一个 P 必须绑定一个 M 才能调度 G。
我们在来看看上面的 M 信息。
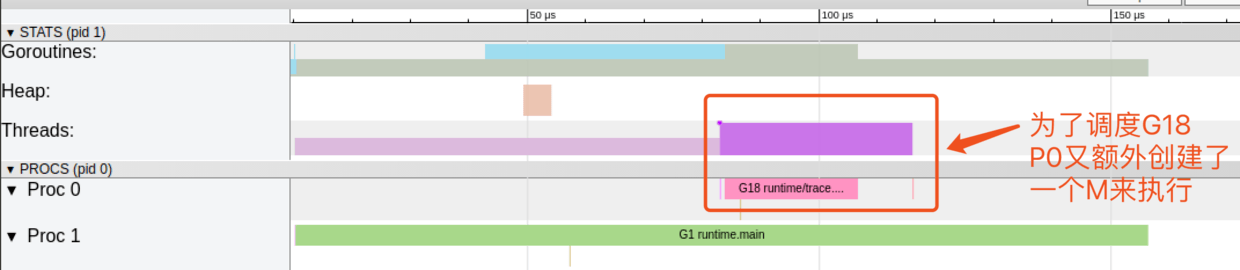
我们会发现,确实 G18 在 P0 上被运行的时候,确实在 Threads 行多了一个 M 的数据,点击查看如下:

多了一个 M2 应该就是 P0 为了执行 G18 而动态创建的 M2.
方式 2:Debug trace
package main
import (
"fmt"
"time"
)
func main() {
for i := 0; i < 5; i++ {
time.Sleep(time.Second)
fmt.Println("Hello World")
}
}
编译
通过 Debug 方式运行
$ GODEBUG=schedtrace=1000 ./trace2
SCHED 0ms: gomaxprocs=2 idleprocs=0 threads=4 spinningthreads=1 idlethreads=1 runqueue=0 [0 0]
Hello World
SCHED 1003ms: gomaxprocs=2 idleprocs=2 threads=4 spinningthreads=0 idlethreads=2 runqueue=0 [0 0]
Hello World
SCHED 2014ms: gomaxprocs=2 idleprocs=2 threads=4 spinningthreads=0 idlethreads=2 runqueue=0 [0 0]
Hello World
SCHED 3015ms: gomaxprocs=2 idleprocs=2 threads=4 spinningthreads=0 idlethreads=2 runqueue=0 [0 0]
Hello World
SCHED 4023ms: gomaxprocs=2 idleprocs=2 threads=4 spinningthreads=0 idlethreads=2 runqueue=0 [0 0]
Hello World
SCHED:调试信息输出标志字符串,代表本行是 goroutine 调度器的输出;0ms:即从程序启动到输出这行日志的时间;gomaxprocs: P 的数量,本例有 2 个 P, 因为默认的 P 的属性是和 cpu 核心数量默认一致,当然也可以通过 GOMAXPROCS 来设置;idleprocs: 处于 idle 状态的 P 的数量;通过 gomaxprocs 和 idleprocs 的差值,我们就可知道执行 go 代码的 P 的数量;- t
hreads: os threads/M的数量,包含 scheduler 使用的 m 数量,加上 runtime 自用的类似 sysmon 这样的 thread 的数量; spinningthreads: 处于自旋状态的 os thread 数量;idlethread: 处于 idle 状态的 os thread 的数量;runqueue=0: Scheduler 全局队列中 G 的数量;[0 0]: 分别为 2 个 P 的 local queue 中的 G 的数量。
下一篇,我们来继续详细的分析 GMP 调度原理的一些场景问题。
三、Go 调度器调度场景过程全解析#
(1) 场景 1#
P 拥有 G1,M1 获取 P 后开始运行 G1,G1 使用 go func() 创建了 G2,为了局部性 G2 优先加入到 P1 的本地队列。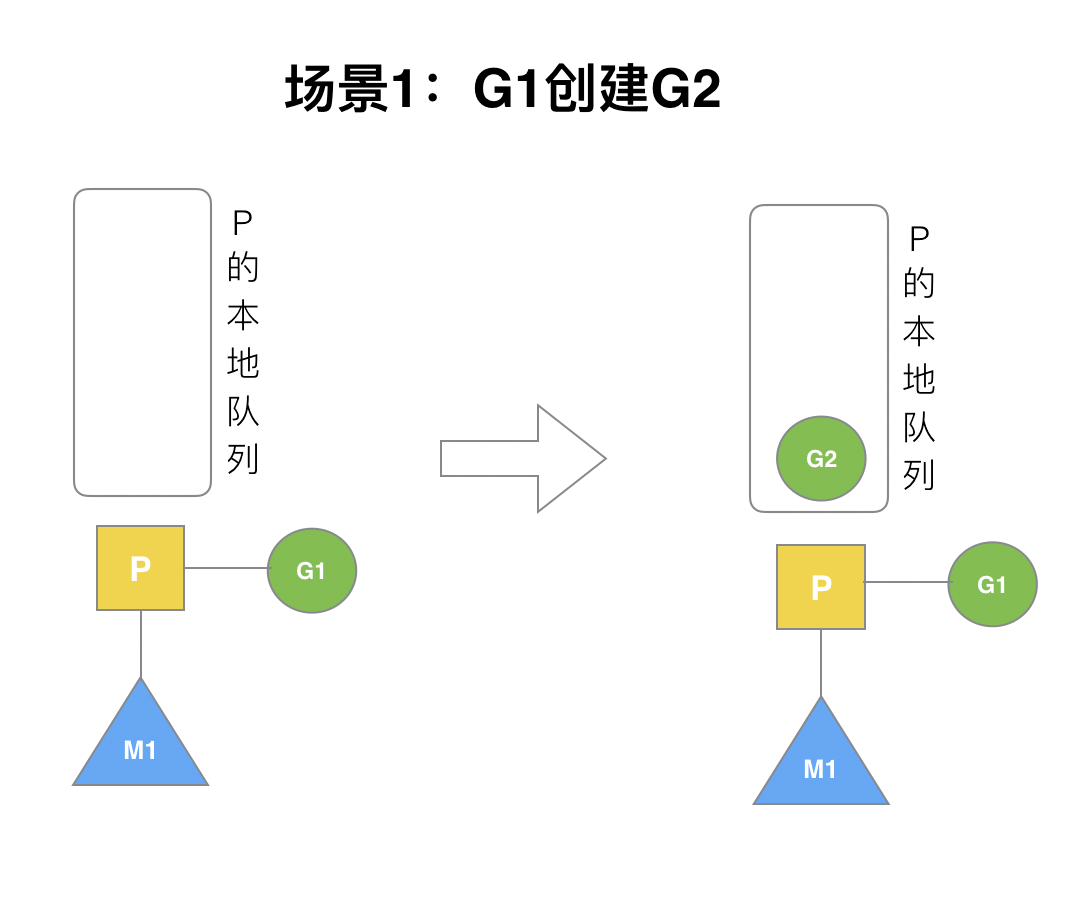
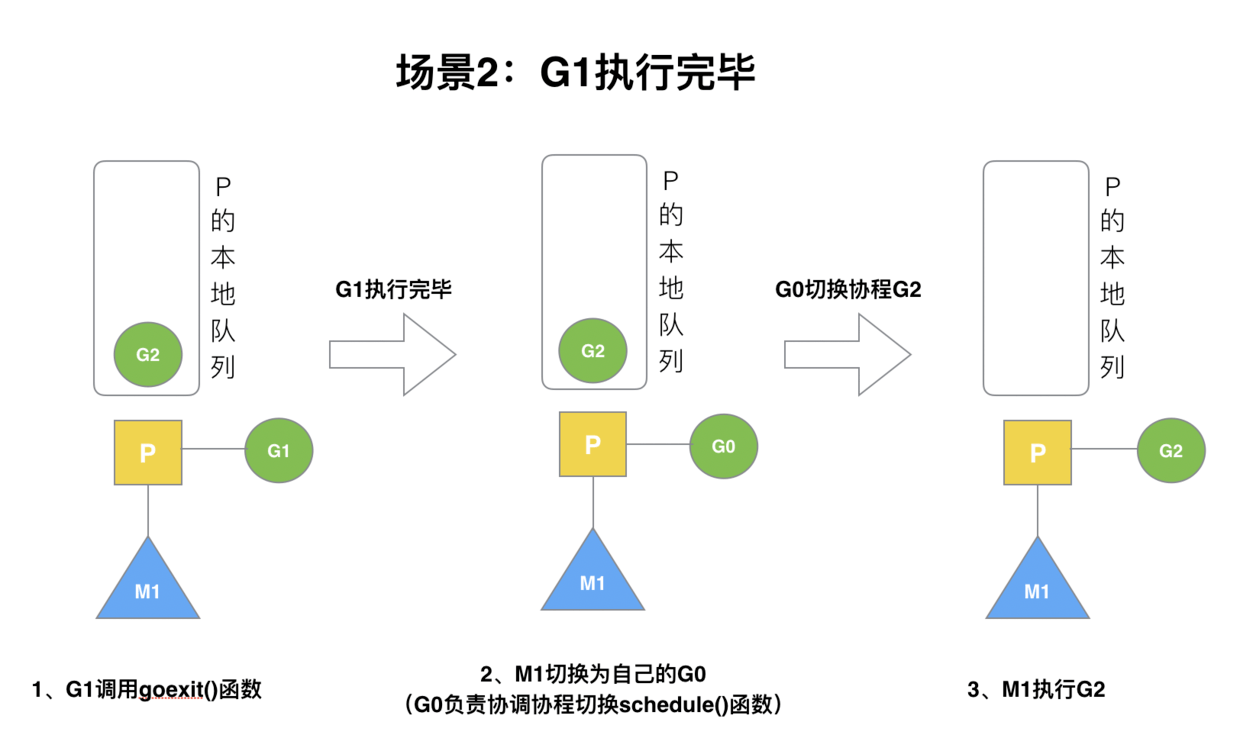
(2) 场景 2#
G1 运行完成后 (函数:goexit),M 上运行的 goroutine 切换为 G0,G0 负责调度时协程的切换(函数:schedule)。从 P 的本地队列取 G2,从 G0 切换到 G2,并开始运行 G2 (函数:execute)。实现了线程 M1 的复用。
(3) 场景 3#
假设每个 P 的本地队列只能存 3 个 G。G2 要创建了 6 个 G,前 3 个 G(G3, G4, G5)已经加入 p1 的本地队列,p1 本地队列满了。

(4) 场景 4#
G2 在创建 G7 的时候,发现 P1 的本地队列已满,需要执行负载均衡 (把 P1 中本地队列中前一半的 G,还有新创建 G 转移到全局队列)
(实现中并不一定是新的 G,如果 G 是 G2 之后就执行的,会被保存在本地队列,利用某个老的 G 替换新 G 加入全局队列)
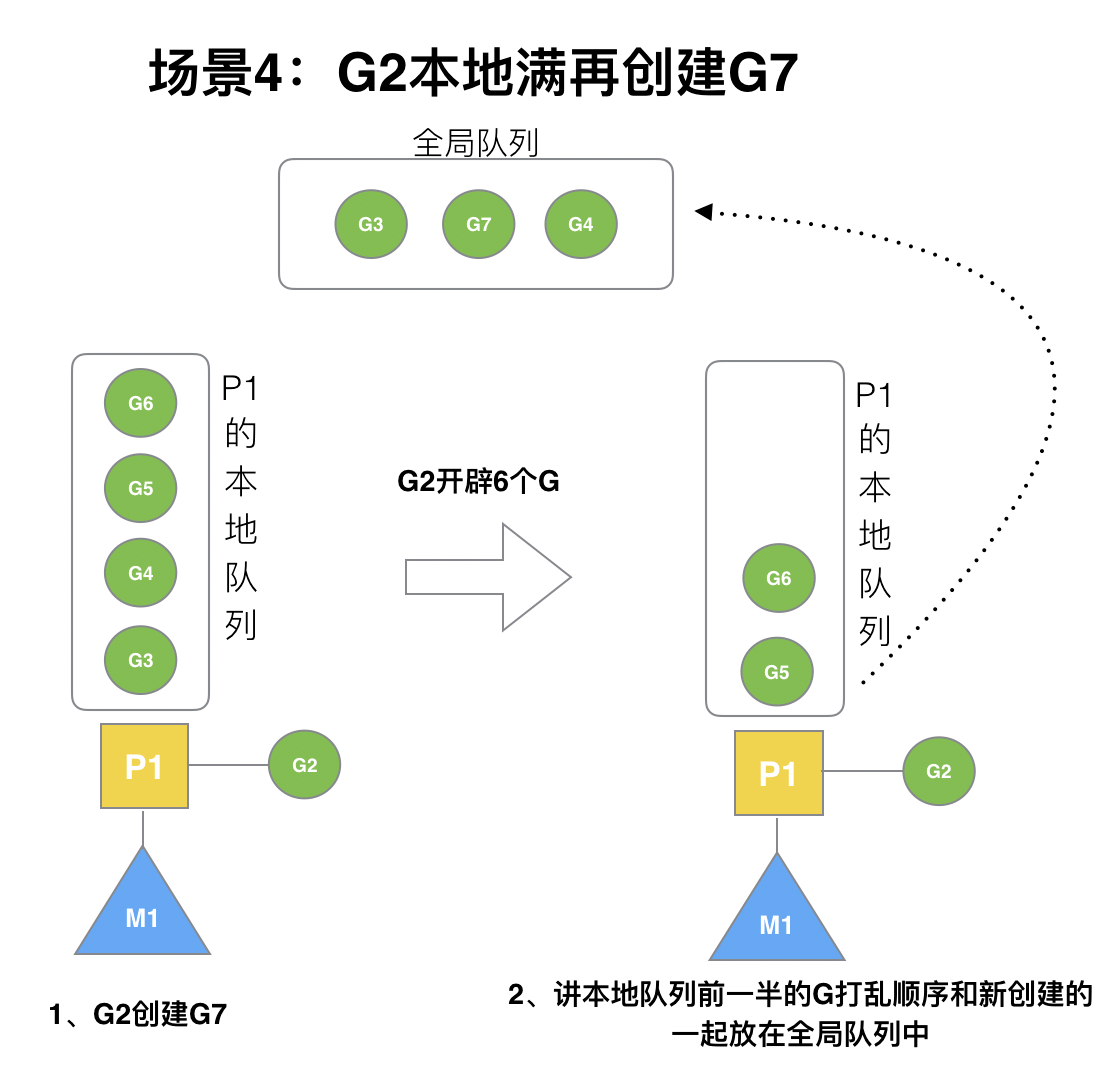
这些 G 被转移到全局队列时,会被打乱顺序。所以 G3,G4,G7 被转移到全局队列。
(5) 场景 5#
G2 创建 G8 时,P1 的本地队列未满,所以 G8 会被加入到 P1 的本地队列。

G8 加入到 P1 点本地队列的原因还是因为 P1 此时在与 M1 绑定,而 G2 此时是 M1 在执行。所以 G2 创建的新的 G 会优先放置到自己的 M 绑定的 P 上。
(6) 场景 6#
规定:在创建 G 时,运行的 G 会尝试唤醒其他空闲的 P 和 M 组合去执行。
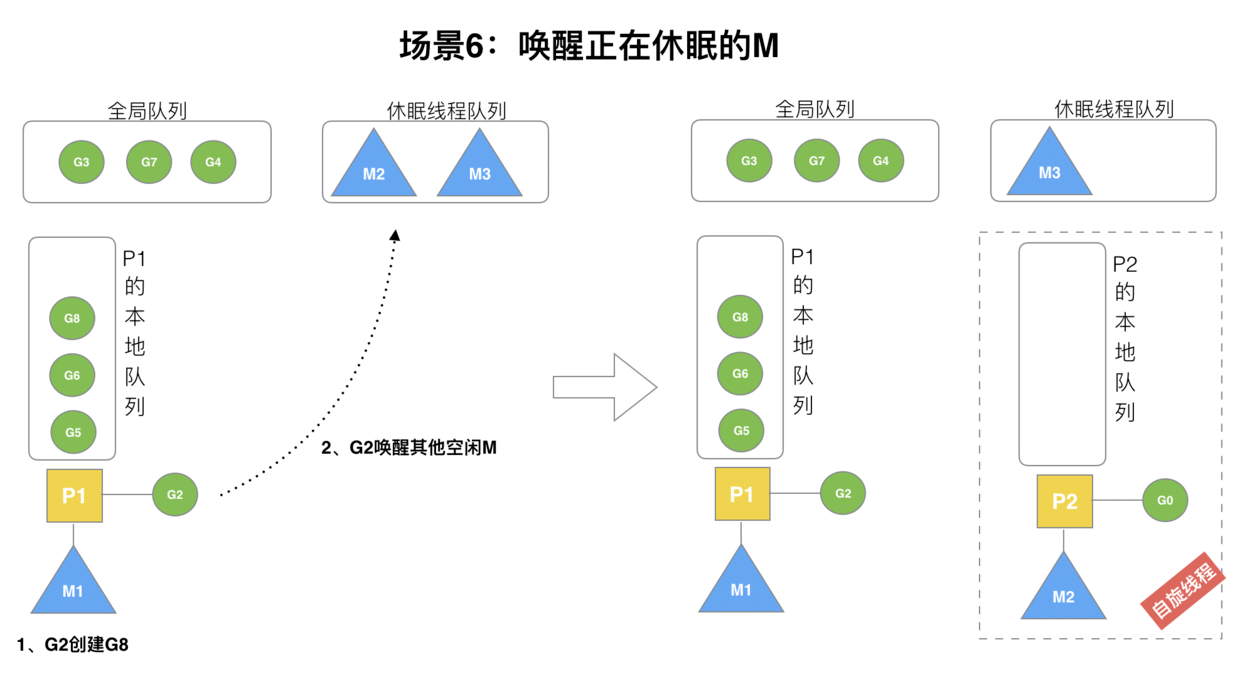
假定 G2 唤醒了 M2,M2 绑定了 P2,并运行 G0,但 P2 本地队列没有 G,M2 此时为自旋线程**(没有 G 但为运行状态的线程,不断寻找 G)**。
(7) 场景 7#
M2 尝试从全局队列 (简称 “GQ”) 取一批 G 放到 P2 的本地队列(函数:findrunnable())。M2 从全局队列取的 G 数量符合下面的公式:
n = min(len(GQ)/GOMAXPROCS + 1, len(GQ/2))
至少从全局队列取 1 个 g,但每次不要从全局队列移动太多的 g 到 p 本地队列,给其他 p 留点。这是从全局队列到 P 本地队列的负载均衡。
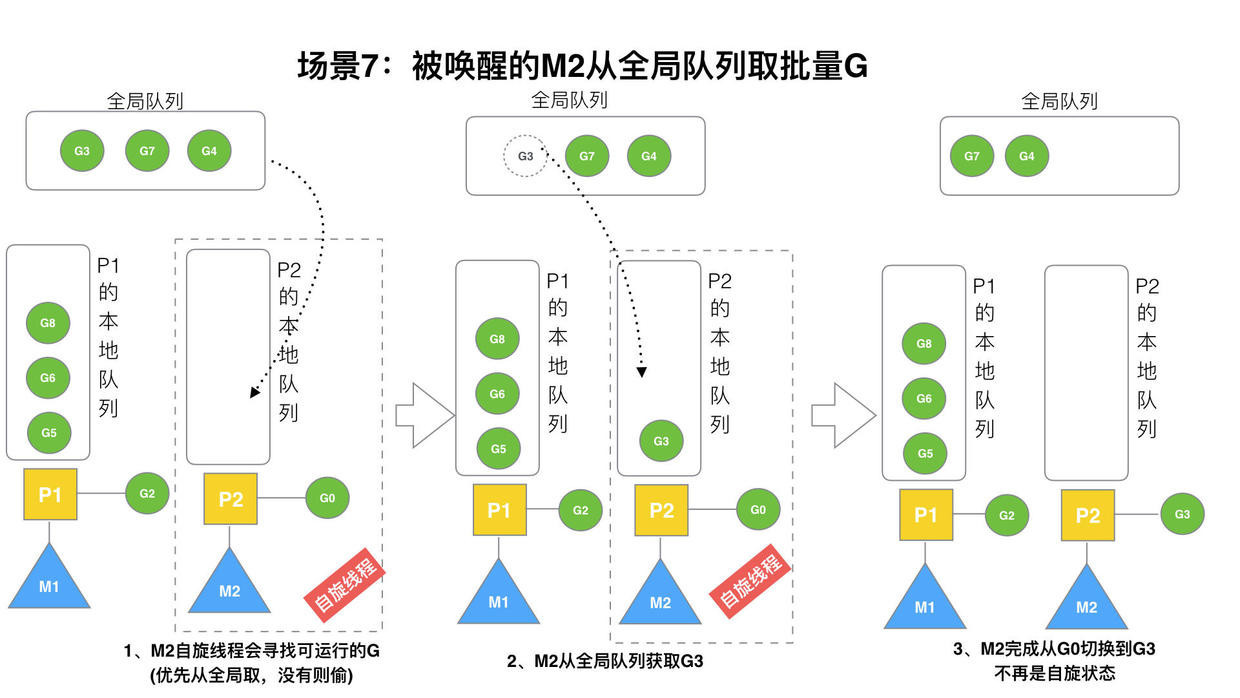
假定我们场景中一共有 4 个 P(GOMAXPROCS 设置为 4,那么我们允许最多就能用 4 个 P 来供 M 使用)。所以 M2 只从能从全局队列取 1 个 G(即 G3)移动 P2 本地队列,然后完成从 G0 到 G3 的切换,运行 G3。
(8) 场景 8#
假设 G2 一直在 M1 上运行,经过 2 轮后,M2 已经把 G7、G4 从全局队列获取到了 P2 的本地队列并完成运行,全局队列和 P2 的本地队列都空了,如场景 8 图的左半部分。
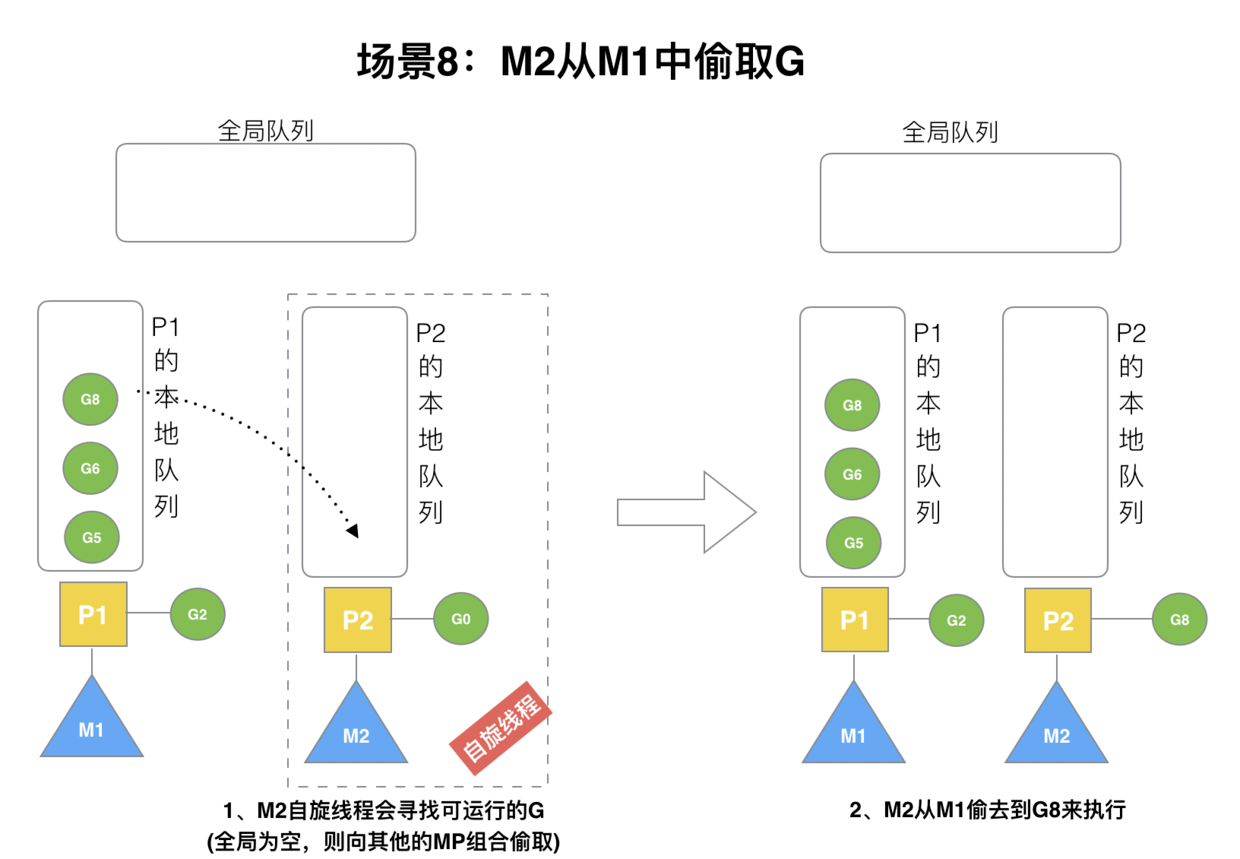
全局队列已经没有 G,那 m 就要执行 work stealing (偷取):从其他有 G 的 P 哪里偷取一半 G 过来,放到自己的 P 本地队列。P2 从 P1 的本地队列尾部取一半的 G,本例中一半则只有 1 个 G8,放到 P2 的本地队列并执行。
(9) 场景 9#
G1 本地队列 G5、G6 已经被其他 M 偷走并运行完成,当前 M1 和 M2 分别在运行 G2 和 G8,M3 和 M4 没有 goroutine 可以运行,M3 和 M4 处于自旋状态,它们不断寻找 goroutine。
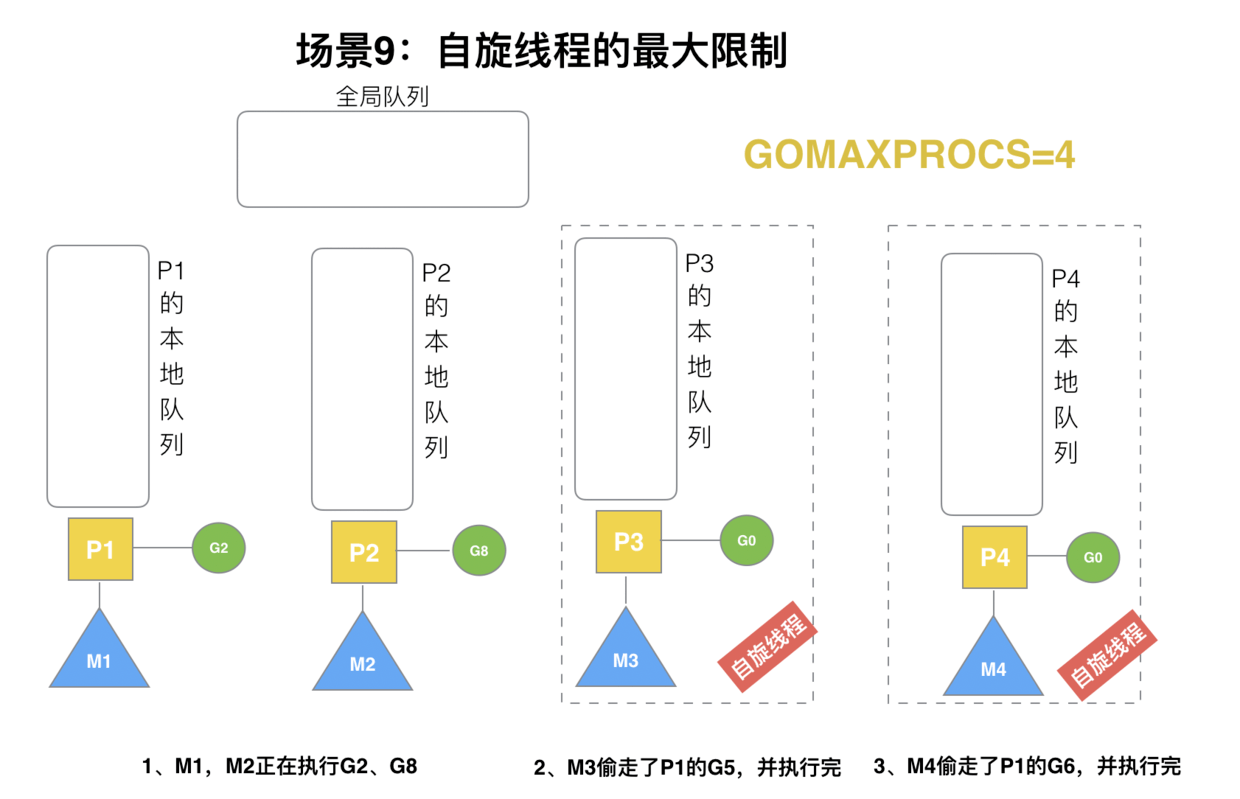
为什么要让 m3 和 m4 自旋,自旋本质是在运行,线程在运行却没有执行 G,就变成了浪费 CPU. 为什么不销毁现场,来节约 CPU 资源。因为创建和销毁 CPU 也会浪费时间,我们希望当有新 goroutine 创建时,立刻能有 M 运行它,如果销毁再新建就增加了时延,降低了效率。当然也考虑了过多的自旋线程是浪费 CPU,所以系统中最多有 GOMAXPROCS 个自旋的线程 (当前例子中的 GOMAXPROCS=4,所以一共 4 个 P),多余的没事做线程会让他们休眠。
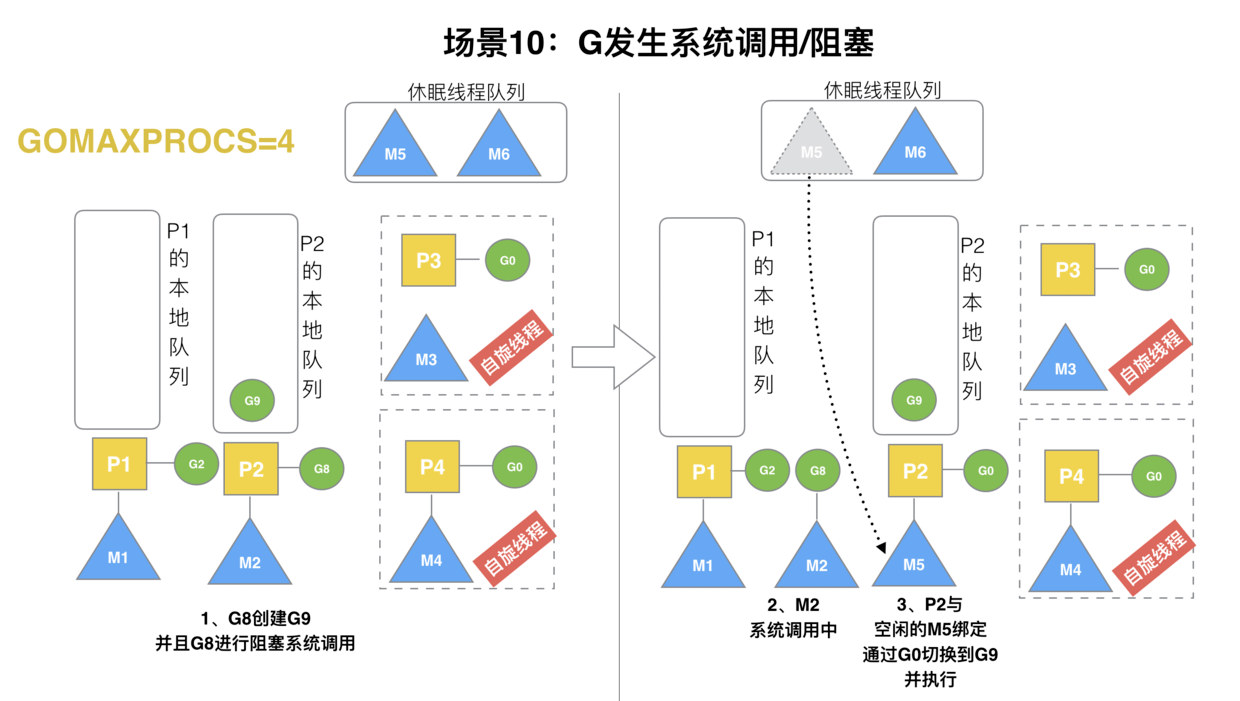
(10) 场景 10#
假定当前除了 M3 和 M4 为自旋线程,还有 M5 和 M6 为空闲的线程 (没有得到 P 的绑定,注意我们这里最多就只能够存在 4 个 P,所以 P 的数量应该永远是 M>=P, 大部分都是 M 在抢占需要运行的 P),G8 创建了 G9,G8 进行了阻塞的系统调用,M2 和 P2 立即解绑,P2 会执行以下判断:如果 P2 本地队列有 G、全局队列有 G 或有空闲的 M,P2 都会立马唤醒 1 个 M 和它绑定,否则 P2 则会加入到空闲 P 列表,等待 M 来获取可用的 p。本场景中,P2 本地队列有 G9,可以和其他空闲的线程 M5 绑定。
(11) 场景 11#
G8 创建了 G9,假如 G8 进行了非阻塞系统调用。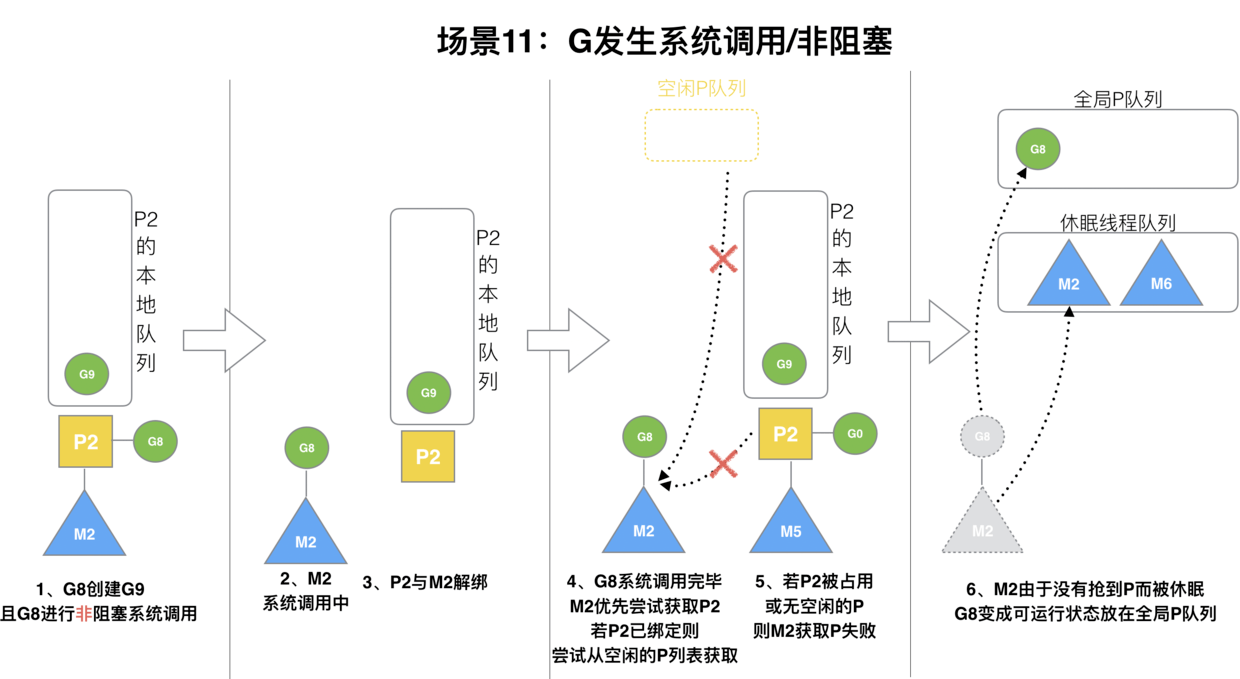
M2 和 P2 会解绑,但 M2 会记住 P2,然后 G8 和 M2 进入系统调用状态。当 G8 和 M2 退出系统调用时,会尝试获取 P2,如果无法获取,则获取空闲的 P,如果依然没有,G8 会被记为可运行状态,并加入到全局队列,M2 因为没有 P 的绑定而变成休眠状态 (长时间休眠等待 GC 回收销毁)。
四、小结#
总结,Go 调度器很轻量也很简单,足以撑起 goroutine 的调度工作,并且让 Go 具有了原生(强大)并发的能力。Go 调度本质是把大量的 goroutine 分配到少量线程上去执行,并利用多核并行,实现更强大的并发。
关于作者:
作者:Aceld(刘丹冰)
mail: danbing.at@gmail.com
github: github.com/aceld
原创书籍 gitbook: legacy.gitbook.com/@aceld
本作品采用《CC 协议》,转载必须注明作者和本文链接